The Robotic Exploration Lab in The Robotics Institute at Carnegie Mellon University conducts research in control, motion planning, and navigation for robotic systems that explore our planet and our universe.
Latest News
Research

Convex Maneuver Planning for Spacecraft Collision Avoidance
An algorithm to design globally optimal low-thrust collision-avoidance maneuvers for short-term conjunction events.



The Surprising Effectiveness of Linear Models for Whole-Body Model-Predictive Control
A single whole-body linearization is sufficient for basic locomotion tasks on humanoids and quadrupeds.






The Trajectory Bundle Method
Unifying Sequential-Convex Programming and Sampling-Based Trajectory Optimization for robust motion planning.



Whole-body Control of Legged Robots with MPPI
The first successful deployment of a whole-body sampling-based MPC system on a real-world quadruped robot.


Convex Model Predictive Control for Stationkeeping Control of Halo Orbits
A convex model predictive control approach for stationkeeping maneuver design of unstable halo orbits.
Real-Time Whole-Body MPC for Legged Robots with MuJoCo
Real-time whole-body model-predictive control of quadruped and humanoid robotics using the MuJoCo physics engine.

Pixels to Torques with Linear Feedback
Data-driven, linear output-feedback policies can effectively control robotic systems using vision.
 Lee")
Control and Actuator Placement Optimization for Large-Scale Problems with Nonlinear Dynamics
A scalable optimization formulation for the simultaneous control and actuator selection and placement for large scale robot systems.



Differentiable Collision-Free Parametric Corridors
A differentiable collision-free corridor generator.
Convex Trajectory optimization for the Soft-Capture Problem
A safe and real-time trajectory optimization algorithm for agile spacecraft maneuvers.
Model-Predictive Control on Resource-Constrained Microcontrollers
A high-speed MPC solver with a low memory footprint that works on microcontrollers common on small robots.




High-Expansion-Ratio Deployable Structures for Long Duration Space Missions
A hierarchical mechanism capable of 50x expansion ratios enabling kilometer scale structures from a single launch.
Motion Reconstruction and Imitation from Monocular Videos
An end-to-end motion transfer framework from monocular videos to legged robots.


State Estimation For Legged Robots
Several different state estimation methods for legged robots.


Differentiable Fluid-Structure Interaction for Robotics
A fully differentiable solver for simulating coupled fluid-robot dynamics
Enhanced Balance for Legged Robots Using Reaction Wheels
Novel hardware design to enhance quadruped robots


Data-Efficient Model Learning for Control
Building new algorithms for learning dynamics models that are sample efficient and generalizable.

Differentiable Collision Detection
Smooth and differentiable collision detection between pairs of convex primitives, enabled by differentiable convex optimization.

CALIPSO - A Differentiable Solver for Trajectory Optimization with Conic and Complementarity Constraints
Trajectory optimization with conic and complementarity constraints–plus differentiable!
Dojo - A Differentiable Simulator for Robotics
Differentiable rigid-body-dynamics with contact simulator for robotic systems.

Trajectory Optimization with Optimization-Based Dynamics
Bi-level trajectory optimization with dynamics represented as constrained optimization problems.
Fast Contact-Implicit Model-Predictive Control
Fast model-predictive control for systems that make and break contact with objects and the environment.
Direct Policy Optimization
Directly optimizing robust policies for feedback motion planning.
Motion Planning for Soft Robots
Real-time simulation and trajectory optimization for soft robots.

Dynamic Games Solver
Developing a fast and robust solver for constrained dynamic games aimed at identifying Nash equilibrium strategies.
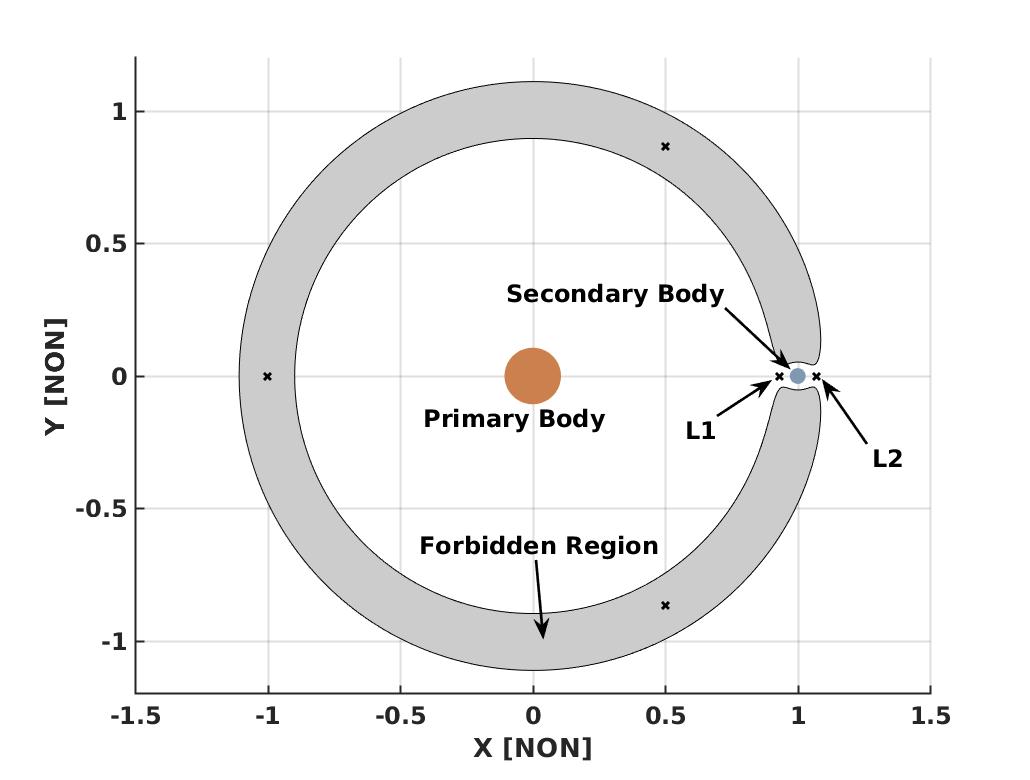
Trajectory Optimization in the Circular Restricted Three-Body Problem (CR3BP)
The CR3BP is a useful model for designing and analyzing spacecraft trajectories that pass between multiple large bodies. We use optimization techniques to find trajectories that meet mission constraints while being dynamically feasible in the CR3BP.

Intelligent Radiation Protection of Commercial Components in Space
Extending lifetimes of commercial microelectronic devices in harsh radiation environments without additional shielding or device alterations.

Fast Trajectory Optimization
Building new solvers for trajectory optimization problems that are fast, accurate, and numerically robust.


Design and Control of Agile Quadrupeds
Designing a new, lost-cost quadrupeds with state-of-the-art control.




Low-Thrust Trajectory Optimization
Optimizing long duration spacecraft maneuvers for electric propulsion.
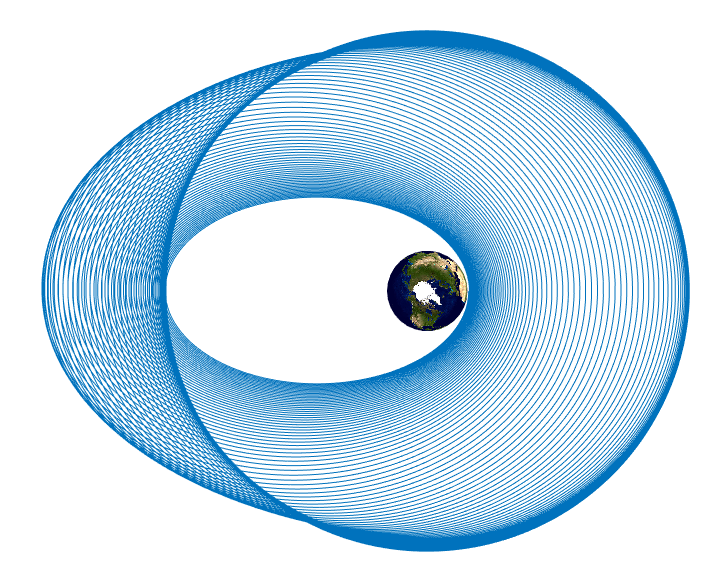
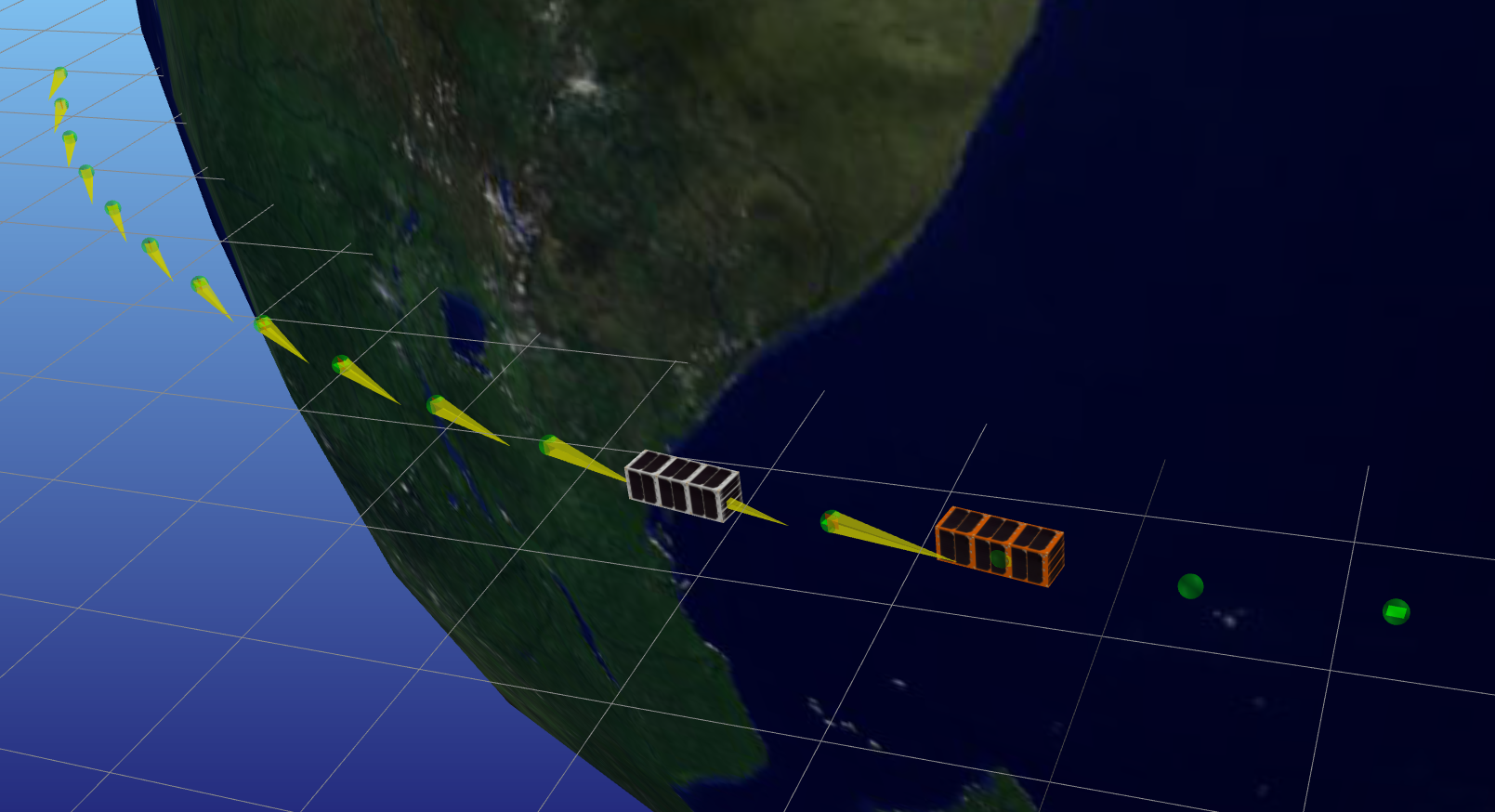
Underactuated Attitude Control of Small Satellites
Developing algorithms and hardware for underactuated control of small satellites, mainly through trajectory optimization techniques of magnetorquer attitude manipulation.

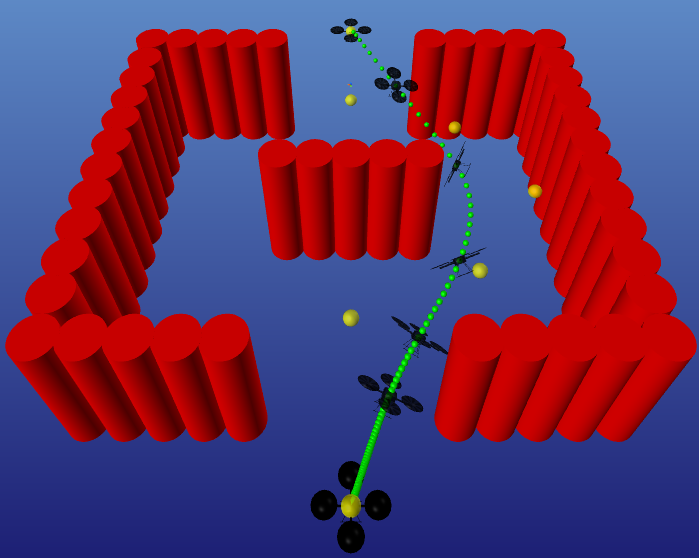
Distributed Trajectory Optimization
Scalable Cooperative Transport of Cable-Suspended Loads with UAVs using Distributed Trajectory Optimization
Fast Solution of Optimal Control Problems With L1 Cost
Developing a fast, low memory footprint algorithm to solve minimum-fuel problems with possible implementation onboard a CubeSat for embedded trajectory optimization.
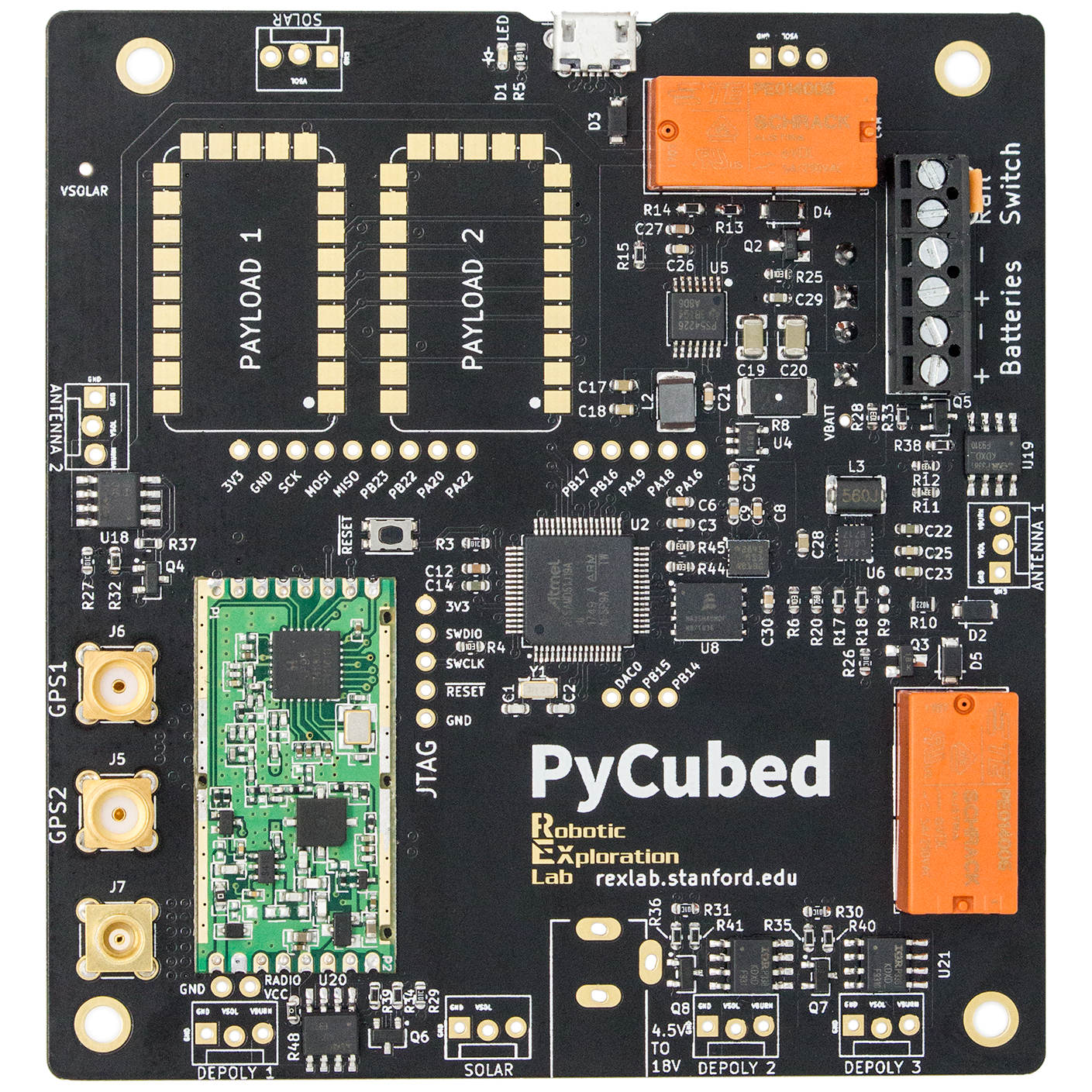
PyCubed
An open-source, radiation-tested reliable cubesat framework programmable entirely in python.

Control and Motion Planning with Contact Interactions
Controlling systems that make and break contact with objects and the environment. Applications to robotic locomotion and manipulation.
Robust Motion Planning
Making things get where they’re supposed to go when we don’t know exactly how they move and what disturbance forces might be pushing on them.
People
Faculty
Zac Manchester
Postdocs
Jon Arrizabalaga
Staff

Aaron Trowbridge

Neil Khera
PhD Students
Swaminathan Gurumurthy
Fausto Vega
Jeong Hun (JJ) Lee

Paulo Fisch
John Zhang
Arun Bishop
Juan Alvarez Padilla

Pedro Cachim

Chase Dunaway
Masters Students
